
ATO: Sensorik als technische Voraussetzung für ATO-Funktionen
Für das automatisierte, schienengebundene Fahren im Vollbahnbereich ist ein technisches Fahrsystem, ein ATO-System mit Sensorik und Aktorik, erforderlich. Dieses muss die heutigen Aufgaben eines Triebfahrzeugführers (Tf) zumindest gleichwertig erfüllen können. Zunächst müssen hierzu verschiedenste Fahrsituationen erfasst werden (Perzeption), damit aus diesen geeignete Aktionen abgeleitet werden können. Zu diesen Fahrsituationen gehören: Zug-Fahren, Rangieren, das Fahrgastmanagement am Bahnsteig und der Umgang mit Problemen in den jeweiligen Fahrsituationen.
Die Aufgabe der Perzeption muss durch geeignete Sensoren erledigt werden. Um die Lösungsansätze und Randbedingungen hierfür weiter erforschen und entwickeln zu können, wird im Projekt ein Vorschlag für ein Messsystem erarbeitet, welches verschiedene Sensoren im Sinne einer „Obermenge“ enthält. Durch diese Sensoren werden für unterschiedliche Szenarien Datensätze erfasst, um sie für Algorithmen (-Entwicklungen) und Systemtests bereitzustellen. Die Konzeption eines solchen Messsystems ist das Hauptziel des Projekts.
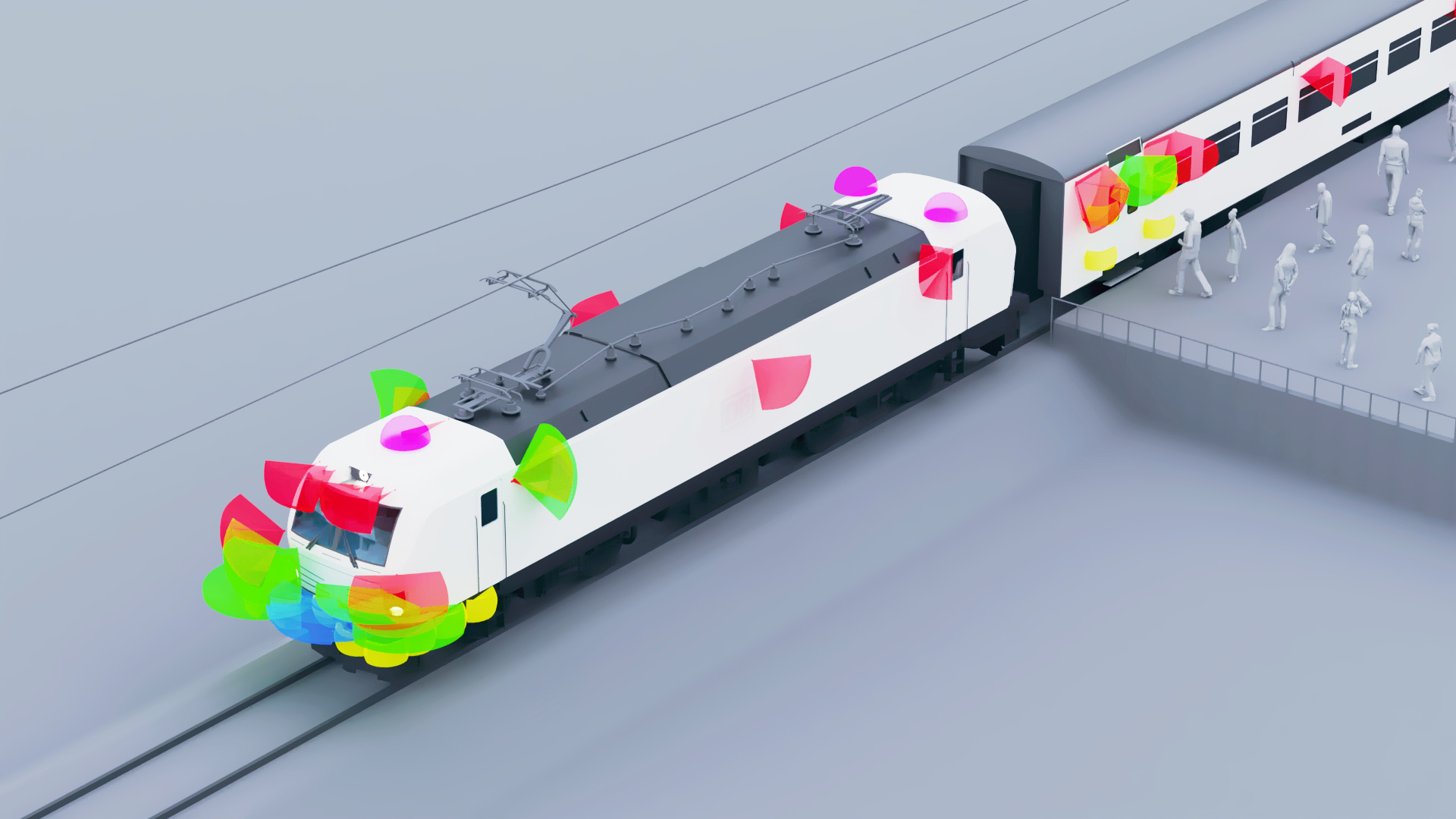
Die im Projekt betrachteten Sensoren für typische Perzeptions-Aufgaben eines Triebfahrzeugführers sind Radar, Lidar, Ultraschall, Kameras, Mikrofone, GNSS und weitere Umgebungsinformationen liefernde Sensoren (Temperatur, Feuchtigkeit, …). Als Basis für die Identifikation der für das Messsystem benötigten Sensortechnologien, wurden aktuelle Forschungsprojekte und verfügbare Systeme des (autonomen) Schienenverkehrs herangezogen. Zusätzlich wurden weitere Technologiefelder, wie das autonome Fahren im Straßenverkehr oder industrielle (fahrerlose) Transportsysteme betrachtet.
Neben der bloßen Identifikation der Sensorik, Vorschlägen der Positionierung am Fahrzeug und ihrer Zuordnung zu verschiedenen Wahrnehmungs-Aufgaben des Triebfahrzeugführers, wurden die eingeplanten Sensoren hinsichtlich ihrer Marktreife untersucht. Zusätzlich wurden Forschungsfragen identifiziert, welche explizit mit den Sensoren bearbeitet werden können; dies insbesondere für eine Anwendung im Vollbahnbereich.
Ein Beispiel für eine solche Forschungsfrage im Kontext der Radarsysteme ist die Frage, welchen Einfluss Schienen und Schotter auf die Erkennung relevanter Objekte haben. Ein anderes Beispiel ergibt sich hier aus den Geschwindigkeiten des Vollbahnbereichs.
Marktverfügbare Radarsysteme im Mobilitätssektor sind im Wesentlichen auf den Straßenverkehr ausgelegt. Während hier Relativgeschwindigkeiten (z. B. entgegenkommender PKWs) von 400 km/h ausreichend sind, kommen diese im Bahnverkehr schnell an ihre Grenzen; beispielhaft seien hier zwei entgegenkommende ICEs genannt. Abgesehen von diesen sensorspezifischen Fragestellungen ergeben sich jedoch auch Forschungsfragen zum Parallelbetrieb einzelner Sensoren: diese betreffen insbesondere die gegenseitige Beeinflussung (Störungen), aber auch daraus entstehende (neuartige) Optionen der Sensorfusion.
Das Projekt konnte erfolgreich mit der Konzeptionierung eines Messsystems abgeschlossen werden.

